Annotated Table of Contents [ PDF | Word | HTML]
Preface [ PDF | Word | HTML]
The principal concepts to be considered in reference to quaternions and anatomical movements are discussed briefly. The preface is an argument for the approach that will be followed in this book. Anatomical movements are movements of a body or a portion of a body. In particular, we will concentrate upon rotations of anatomical objects.
It is argued that both location and orientation are central to understanding anatomical movements. The orientation component is usually forgotten or implicitly assumed without formal acknowledgement.
The location, extension, and orientation of an anatomical object can be expressed by arrays of vectors, called framed vectors, that are transformed by quaternion multiplication in the same manner as the represented anatomical objects are transformed by rotations in three-dimensional space. The use of quaternions to express rotations in three-dimensional space is an intuitive and powerful approach to the description of anatomical movements.
Introduction to Quaternions and Anatomical Movements [ PDF | Word | HTML]
The fundamental concepts upon which this book is based are defined and related to the problem of describing anatomical movements.
Quaternions are defined as the ratios of vectors. That is their most useful interpretation for present purposes.
Orientation is expressed as an ordered set of three mutually orthogonal unit vectors, called frames of reference. The difference between right-handed and left-handed frames of reference is described and the convention of using right-handed systems introduced.
The concepts of location, extension, and orientation are examined and the possibility of their expression by vectors is introduced. The full set of descriptive vectors, which encodes location, extension, and orientation, is called a framed vector. A framed vector is a set of vectors that stand as a formal equivalent for the anatomical object under consideration.
The combination of location and orientation that define an anatomical object are called its placement. Anatomical description is the expression of placement together with a description of its extension. All of these attributes are encoded in framed vectors.
The concept of representing rotations of anatomical objects by conical rotations of vectors is briefly introduced. A conical rotation is rotation that occurs about an axis of rotation that is not orthogonal to the rotating vector.
An Intuitive Logical Formalism for the Description of Anatomical Movements [ PDF | Word | HTML]
In order to describe anatomical movements it is necessary to develop a number of concepts related to the formal structure of quaternions and their algebra, how they are formally equivalent to rotations of vectors in a plane, and how they may be used to represent conical rotations.
Spin and swing are introduced and it is argued that they can be defined only relative to the orientation of an object. Informally, spin a rotation about the anatomical axis of an object and swing is any other rotation of the object. If the anatomical axis of the rotating object is perpendicular to the axis of rotation, then the swing is a pure swing.
A number of examples of the calculation of anatomical movements about axes of rotation are considered, to illustrate the basic approach and its consequences.
Transformation of Orientation: Revisiting Spin and Swing [ PDF | Word | HTML]
The concept of null spin is introduced. Null spin occurs is when two orientations may be transformed into each other by a single rotation confined to a single plane. The concept depends upon the concept of a ratio of orientations. A ratio of orientations is the quaternion that rotates the first orientation into the second orientation.
A method for computing the ratio of two orientations is introduced and demonstrated. The method for computing the ratio of two orientations involves finding two planar rotations that can be concatenated to obtain the conical rotation that is the ratio. An illustrative example is considered.
Finally, the use of ratios of orientations to characterize the anatomy of a bony assemblage and to compute the consequences of movements in such an assemblage is illustrated by describing the arm/forearm linkages in terms of framed vectors and computing a two-part movement in that assemblage.
Examination of Transformations of Orientation in a Universal Joint [ PDF | Word | HTML]
The eyeball in its orbit is a straightforward system for exploring the nature of movements in a universal joint controlled by six muscles with a clearly defined performance objective. Because the eye sees best when the visual image is correctly oriented upon its retina, we have a well-defined criterion for performance. It is shown that that constraint on movement leads to two well established basic relationships for eye movements, Listing’s Law and Donder’s Law.
Donder’s Law basically states that for each direction that the eye looks, there is an optimal orientation of the eyeball, the one that keeps the visual field meridians aligned as closely as possible with the retinal meridians. Listings Law says that for rotations to and from a particular gaze, the axes of rotation of the eye all lay in a single plane. We show that Listing’s Law is a logical consequence of Donder’s Law.
Both laws are very efficiently stated in terms of gaze direction (location) and gaze orientation. It is impossible to express them without at least implicit consideration of orientation. The orientations that satisfy Donder’s Law are the orientations that have null spin relative to neutral gaze. Listing’s Law may be framed as a statement about the ratios of orientation. The rotations that satisfy Listing’s Law are generally not the shortest trajectory between the two gaze directions. The shortest trajectory between two gaze directions, the great circle trajectory, will generally result in the eye being rotated relative to its optimal orientation. The trajectory that will insure that the eye lands with the correct gaze direction and gaze orientation is the ratio of the null spin orientations for each gaze direction.
Donder’s Law implies a particular set of muscle lengths for the six extraocular muscles for each gaze direction. The surface generated when we plot the set of muscle lengths versus gaze direction is computed and illustrated. The surface is complex with moderate curvature in all the component surfaces.
We also explore the differences in the muscle length versus gaze direction surface if we assume the presence of a fascial membrane supporting the eyeball in the orbit and guiding the eye muscles, which is the actual anatomical situation, versus the usual configuration that is illustrated in textbooks and atlases, where the membrane is not present. The model with fascial slings for the external eye muscles changes the surface and flattens the component surfaces to a modest degree.
The same model allows us to examine the pulling directions of the individual eye muscles when the eye is looking eccentrically. We are able to consider the degree of spin and swing generated by each muscle at each gaze direction. In this case, the pertinent anatomical axis for defining spin and swing is clear from the functional demands of the eye. There is a simple relationship between swing and spin for a rotating eye.
Finally, we explore a possible mechanism that will ensure that the eye will always be correctly oriented for each gaze when the eye makes saccadic eye movements. The trajectory that will ensure that the eye is correctly oriented is a conical rotation about the axis of rotation that is the intersection of the Listing’s planes for the beginning and the ending gazes. It is the ratio of the two planes. The physiological realization of that action is consistent with the eye muscle lengths during the trajectory lying in the muscle length surface that was computed on the assumption of Donder’s Law.
Spinal Dynamics I: The Axio-atlanto-occipital Assemblage [ PDF | Word | HTML]
In the next few chapters, we explore a number of topics related to the anatomy and movements of the cervical spine. In this chapter, the anatomy of the joints between the occiput of the skull, the atlas vertebra (C1), and the axis vertebra (C2) are expressed in a model with framed vectors for each bone and quaternions for each joint motion. Using the model, it is possible to address a number of questions related to the anatomy and physiology of that region.
It is determined through calculation from the anatomical description that the vertebral artery is disposed so that there should not be a significant strain upon the artery within the skull. On the other hand, there is a definite possibility for pathological strain in the artery as it passes between the transverse foraminae of the atlas and the axis. We are able to calculate the relationship between the excursion into lateral rotation between the bones and the length of the vertebral artery needed to span the gap. The changes in the gap between the foraminae is such that the vertebral artery could not stretch enough to accommodate the necessary change in length, which explains why there is a substantial slack in that segment of the arteries. It also indicates why mechanical damage to the vertebral artery is far more common in that segment than in any other part of the artery. Should the amount of lateral rotation in that joint increase even moderately, it is probable that the vertebral artery would be strained enough to tear it.
The main restraint upon lateral rotation in the atlanto-axial joint is thought to be the alar ligament, which links the occiput and the odontoid process of the axis. It is possible to calculate the consequences of that ligament for movements between the three bones. Our calculations, based upon a reasonable anatomical description of the region, indicate that a small sideflexion of the occiput upon the atlas before lateral rotation will effectively remove the restraint of the alar ligament upon contralaterally directed lateral rotation between the atlas and the axis. Doing so will allow significantly greater angular excursions between the bones and may produce a serious strain in the vertebral artery as it bridges the gap between the bones. That is clinically relevant because it is common practice to sideflex the head prior to manipulating the atlanto-axial joint into endrange lateral rotation.
Spinal Dynamics II: Lower Cervical Spine Anatomy [ PDF | Word | HTML]
The lower cervical spine, including all the joints between the second cervical vertebra and the first thoracic vertebra, forms a complex bony assemblage with seven similar elements that move in consistent ways upon each other. In this chapter, the anatomy of the lower cervical spine is considered in some detail and a model is introduced that captures most of the features of the lower cervical vertebrae that are relevant to its movements. The lower cervical vertebrae are similar enough in these respects that it is reasonable to use the same mathematical representation for each vertebra. A framed vector represents each vertebra and the movements between pairs of vertebrae are represented by quaternions and centers of rotation. The movements between lower cervical vertebrae are of two types, sagittal movements into flexion and extension and oblique movements that combine lateral rotation and side flexion. Vertebral bodies are graphically represented by flattened tori and the facet joints by discs. With the model it is possible to compute the configuration of the lower cervical spine with any combinations of sagittal and oblique movements in its joints. A few examples are illustrated.
Spinal Dynamics III: Computing Compound Movements [ PDF | Word | HTML]
Compound movements, that is, movements in which there is a combination of rotations and translations, are considered in this chapter. The movements of the lower cervical spine are complex functions of the movements in the individual joints. Whereas, the movements between the pairs of individual vertebrae are essentially rocking movements, the movements of the entire assemblage of bones may sweep out wide excursions, leaving the more rostral vertebrae substantial distances from their locations in neutral configuration and tilted at large angles to their original orientations.
A means of computing the effective centers of rotation for vertebrae and the translations that they experience is developed in preparation of examining the movements of the lower cervical spine in some detail. The effective center of rotation for a movement is contingent upon the point of reference. It is the location of the center of a conical rotation on the assumption that the change in orientation is entirely due to a single conical rotation, starting at the original location of the anatomical object. Frequently, the actual final location is not the same as that which would occur because of the computed conical rotation, therefore there is a concurrent translation. Such a combination of a conical rotation and a translation that achieves the same movement as a multi-jointed assemblage is called a compound movement.
Spinal Dynamics IV: Applying the Model to the Lower Cervical Spine [ PDF | Word | HTML]
This chapter describes the application of the model developed in the last two chapters to the analysis of movement in the lower cervical spine. The principal analytic tool is the resolution of the movements of individual vertebrae into compound movements, a combined rotation and translation. Most of the effort goes into the determination of the effective centers of rotation for the vertebrae. Several types of movements are considered.
The first movements considered are from neutral configuration to endrange flexion, extension, and oblique movements, then combinations of those movements. It is observed that the effective centers of rotations for movements of the more rostral vertebrae are located a substantial distance caudal to the vertebra. The amounts of caudal shift of the effective centers of rotation are greater for sagittal movements than for oblique movements. Oblique movements also have their effective centers of rotation shifted out of the midsagittal plane, ipsilaterally or contralaterally, depending on the particular combination of movements.
Secondly, movements between eccentric configurations are considered in the same manner. Initially, the movements are between the primary endrange configurations in circumduction, then between successive stages of a single trajectory from neutral configuration.
Finally, the circumduction movement is divided into a series of small segments and the effective centers of rotation, axes of rotation, and translations for each segment are computed. Such finely divided movements resolve into a surface in three dimensions swept out by the centers and axes of rotation. That surface is in some ways like the derivative of the movement and in some ways like an evolute of a curve in three-dimensional space.
Spinal Dynamics V: Another Oblique Rotation [ PDF | Word | HTML]
This brief chapter considers another possible rotation that is consistent with the anatomy of the lower cervical spine, but not commonly described in the kinesiological literature although it is easy to perform. The intent is to show how the model allows one to explore questions that are difficult or impossible to consider in vivo. The model shows how movements about the alternate oblique axis of rotation might appear for the neck in toto and where the movements might be limited by impingements and strains in ligaments. It also gives a graphic demonstration of the consequences of shifting the axis of rotation relative to the orientation of the anatomical object. Rotation about a posteriorly tilted oblique axis of rotation leads to sideflexion and lateral rotation in the same direction while rotation about the anteriorly tilted oblique axis of rotation leads to sideflexion and lateral rotation in opposite directions, as conventionally defined.
On Evolutes and Frames of Curves [ PDF | Word | HTML]
When considering the movements of finely divided trajectories in the lower cervical spine a mathematical object was generated that was in some ways like the evolute of a curve in that it traced the centers of rotation for the curve. The evolute of a curve is the trajectory of the instantaneous centers of curvature for a curve in two-dimensions. In this chapter, we consider the calculation of the trajectory of the centers of curvature of a curve in three-dimensions, a line that has been called an evolutus. In the process, it is necessary to attach a frame to the curve at each point, so, the curve has a natural orientation, with its orientation being a consequence of its curvature. A couple examples are computed to illustrate the concepts.
Distorting the Box: Strain in Anatomical Media [ PDF | Word | HTML]
This chapter and the next two chapters address the situation when a frame is distorted by strains in the material where it resides. Unlike the frames considered up to this point, the frames under consideration are extension frames. Because such frames have a definite location and the lengths and directions of the axes relative to each other can change, they are given a different name, being called boxes. In this chapter, the concept of a box is defined and examined in situations where the matrix that contains the box is stretched or compressed in one or more directions and when the matrix is sheared.
A box is a set of mutually orthogonal unit vectors at a point in a block of material that is strained. The three vectors of the box frame are called its edge vectors. They can be visualized as the corner of a small cube of the material. The strain causes the component edge vectors,  , to be lengthened, shortened, and/or rotated as the material is stretched compressed, and/or sheared. It is noted that the scalar of the triple vector product of the box’s edge-vectors, , to be lengthened, shortened, and/or rotated as the material is stretched compressed, and/or sheared. It is noted that the scalar of the triple vector product of the box’s edge-vectors,  , the strain quaternion, is equal to the volume of the box, , the strain quaternion, is equal to the volume of the box,  . That index is called the volumetric strain. The vector of the quaternion product, the vector strain, . That index is called the volumetric strain. The vector of the quaternion product, the vector strain,  , is a function of the movements of the box’s edge-vectors relative to each other. If the edge-vectors remain mutually orthogonal, then the vector of the strain quaternion is null. , is a function of the movements of the box’s edge-vectors relative to each other. If the edge-vectors remain mutually orthogonal, then the vector of the strain quaternion is null.
The concept of a strain transform is developed as a means of computing the distortion that occurs when a test box is acted upon by a strain. The strain transform is an expression of the strain in terms of a particular set of mutually perpendicular axes. A strain transform acts upon a test box to generate the strained box.
It is shown that the distortion of the box by strain depends upon the orientation of the unstrained box relative to the strain. If the strain is only expansion and/or compression, then it is possible to find a box that experiences only volume strain. If the strain shears the matrix, then there is no box that will not experience vector strain. On the other hand, most boxes experiencing only expansion and/or compression will experience vector strain, unless their edge vectors are aligned with the directions of expansion and/or compression. It turns out to be very difficult to determine if a strain involves shear or not based on the distortions it causes.
Bubble Strain: The Measurement of Shear by the Distortion of Spheres [ PDF | Word | HTML]
Boxes are point functions in the sense that they are defined at points in the strained matrix. In this chapter, we explore a different way of looking at strain. Instead of three orthogonal vectors at a point we assume a sphere of material and look at how it is distorted by compression and/or expansion versus shear. With this approach it is possible to effectively examine all possible test boxes at the same time and one can see that there are definite geometrical principles that determine the nature of a test box, contingent upon its orientation.
Initially, a means is described for sampling a sphere uniformly, so that one can obtain reliable statistics for the distortion. It involves computing the vertices of a dodecahedron and/or an icosahedron inscribed a unit sphere. The vectors to the vertices are strained according to the strain transform derived in the last chapter and the array of distorted vertices sketches a distorted surface that depends upon the nature of the strain.
It is found that while the details of the distortion are different in the two situations, the result is similar. The distorted sphere becomes an ellipsoid, called the strain ellipsoid. With compression and/or expansion the ellipsoid may be prolate or oblate. The axes of the ellipsoid are in the directions of the compressions and/or expansions. With shear, the distorted sphere is a prolate ellipsoid. Shear creates an ellipsoid that is tilted relative to the shear direction. One can determine the shear direction from the tilt of the resulting prolate ellipsoid.
Because all shear ellipsoids are prolate and some combinations of compression and/or expansion produce prolate ellipsoids, any shear ellipsoid is equivalent to the ellipsoid for a particular combination of compressions and/or expansions. However, the two strains are not equivalent, because the compressive strain that matches the shear strain must continually change direction as the shear angle changes even though the direction of the shear is constant.
The relationship between the amount and direction of shear and the distortions of the sphere is derived and plotted. A method of finding the plane of the shear, given a shear ellipsoid, is developed and illustrated.
Orthogonalized Strained Boxes [ PDF | Word | HTML]
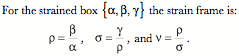
In this chapter, we return to a consideration of strained boxes and define a new concept, the strain frame. The strain frame of a distorted box is a frame of mutually orthogonal vectors that is derived from the relationships between the axes of the strained box. The unit vector of the ratio of the second axis to the first is  , the ratio of the third axis to , the ratio of the third axis to  is is  , and the ratio of , and the ratio of  to to  is is  . .
The strain frame provides an orientation for a strained box, which would otherwise lack a definite orientation. It is argued that the strain frame for an unstrained box is indefinite until the box is strained, at which time it takes a definite value, contingent on the nature of the strain. So, although an unstrained box has a clear orientation, aligned with its axes, its strain frame is undefined until the strain is specified. Consequently, the strain frame is not identical with orientation. This a desirable property of strain frames when computing the ratios of orientations that occur with strain.
It is shown that, as a consequence of the manner in which a strain frame is defined, the strain quaternion can be expressed a function of the components of the strain frame. The  and and  axes of the strain frame are the vectors of the strain quaternion in special cases, when only pairs of the test box axes are shifted by the strain. When the strain leaves no two axes mutually perpendicular, then the strain quaternion is a function of all three strain frame axes. There is an interaction between the two rotations, which causes the vector of the strain quaternion to extend in the direction of the axes of the strain frame are the vectors of the strain quaternion in special cases, when only pairs of the test box axes are shifted by the strain. When the strain leaves no two axes mutually perpendicular, then the strain quaternion is a function of all three strain frame axes. There is an interaction between the two rotations, which causes the vector of the strain quaternion to extend in the direction of the  axis. As the distortion is reduced, the vector of the strain quaternion moves nearer to the plane determined by the axis. As the distortion is reduced, the vector of the strain quaternion moves nearer to the plane determined by the  and and  . .
One can invert the strain quaternion when it is expressed in terms of the strain frame to obtain the rotations of the test box axes. When no two edge vectors are mutually orthogonal, the vector component of the strain quaternion is not obviously indicative of the internal rotations. It is necessary to project the strain quaternion vector upon the component axes of the strain frame for the strained box. However, doing so leads directly to the desired excursions about the  and and  axes. axes.
Distortion in Media: Compressive and Tensile Strain [ PDF | Word | HTML]
In this chapter the nature of compressive and tensile strains are analyzed with some of the tools developed in the last few chapters.
Initially the situation in which the medium is not allowed to spread laterally is analyzed, primarily to establish the basic approach in a situation where the mathematics is less challenging. It is found that the strain of a framed vector in a medium that is allowed to contract or expand in one dimension is proportional to the displacement of the moving face. The strain quaternion is a scalar and the rotation quaternion for the orientation frame is unity.
The situation is more difficult where the medium is allowed to flow in the plane perpendicular to the moving face. Initially we find the amount that the lateral margin of the medium moves, assuming laminar flow. Using that information, together with the derivation for the vertical movement of the medium experiencing compressive or tensile strain, it is possible to determine how any point in the medium moves. Using that information it is possible to compute flow lines in the medium and the amount of distortion in test boxes that experience the strain. The strain quaternion may be computed from the strained box.
Distortion in Media: Shear Strain [ PDF | Word | HTML]
In this chapter the nature of shear strains is analyzed with the same tools as in the last chapter. Two types of shear strain are examined: linear shear and rotational shear.
With linear shear, the change in location has a characteristic profile with less strain near the moving surfaces and maximal strain in the middle of the sheared slab. That profile leads to no stretching or contraction in a horizontal plane parallel with the moving surface(s), but a tilting of the vertical axis at an angle that depends upon the depth in the slab. The degree of tilting is computed and plotted. It is shown that there is no volumetric strain in the sheared medium. Orientation does not change in a linearly sheared slab of material.
With uniform rotational strain the situation is similar except that the shear occurs in concentric rings about the axis of rotation. Changes in location are expressed in terms of angular excursions. The derivations are more complex than those for linear strain, but the end result is similar. There is no volumetric strain, but there is vector strain that depends upon depth in the slab. All of the strain axes are rotated by the change in location, therefore there is a change in orientation as the material is sheared.
Quaternion Numbers [ PDF | Word | HTML]
Quaternions are interesting in themselves as a special type of number. Numbers are explored as a series of generalizations from counting numbers to integers, real numbers, imaginary and complex numbers, quaternions and octonions. The algebra of quaternions is introduced and a number of special quaternions are defined, such as the inverse and the conjugate of a quaternion.
The interpretation of quaternions as rotations in three-dimensional space and their use for expressing conical rotations are reviewed.
The orientability of quaternion vectors is discussed and the concept of frames of reference as expressions of orientation is considered.
It is shown that the ratio of two planes is their intersection.
A protocol to compute the ratio of two orientations is outlined and illustrated with examples.
The chapter closes with a brief introduction to the differentiation of quaternions and orientations.
Final Thoughts on the Control of Placement in Anatomical Systems [ PDF | Word | HTML]
The fundamental premise of this book is that placement, a combination of location and orientation, is a central concept in the description of anatomical movements. It must also be central to the control of movement by the nervous system.
The traditional approach is fundamentally a qualitative approach, based upon cardinal directions of movement. It is argued that traditional methods of describing anatomical movements are both inaccurate and inadequate for a careful description of movement in anatomical systems. Beyond that, it is common practice in the traditional approach to assume many elementary attributes of the system are obvious when they are not. In fact, the values of anatomical axes or axes of rotation may be and often are variables. In the traditional approach one must often determine their values from context. That is not a fundamental flaw in that it is always possible to define them explicitly, but it is often not realized that it is necessary to do so.
Many of the fundamental concepts of anatomical descriptions of movement are dependent upon the context in which they are viewed. In the traditional approach, that context is often unstated or implicitly assumed to take a particular value. In the approach outlined here, the values of all parameters and variables must be specified. It is fundamentally a mathematical approach based upon quaternion analysis and the expression of location, extension, orientation, and axes of rotation by vectors or sets of vectors. The concepts of frames and framed vectors are at the foundations of all of the models and discussions in this book.
The framed vector approach to the description of anatomical movements starts with an anatomical description. That description is expressed in a manner that allows one to move smoothly and naturally from the anatomical description to the movements of the structure, where all movements occur within the constraints of the anatomy. The language used to couch the anatomical descriptions is a powerful, intuitive, efficient means of expressing anatomy in such a way as to lead naturally to computation.
In the first part of this book, frames of reference are rigid structures that move as a unit. In the second part, it is demonstrated that allowing an extension frame or box to be distorted by local strain in a medium provides a useful means of characterizing strain and computing the resultant flow in the medium. The behavior of boxes provides another application of the type of approach introduced by this book. |